Acces point cloud
-
Hello everyone!
I have a simple question, how can you acces the point cloud of the camera? Or is points_3d the point cloud?
I have been experimenting with both the Tau Lidar camera and an external library called open3d, which is used to visualize point clouds. I tried to use points_3d to visualize the point cloud by converting it into a .ply file, but noticed the point cloud wasn't as accurate as i had hoped it to be.
Here are some examples as to what I mean:
https://imgur.com/a/5yfgAZp
A screenshot from what the camera sees (wooden block):

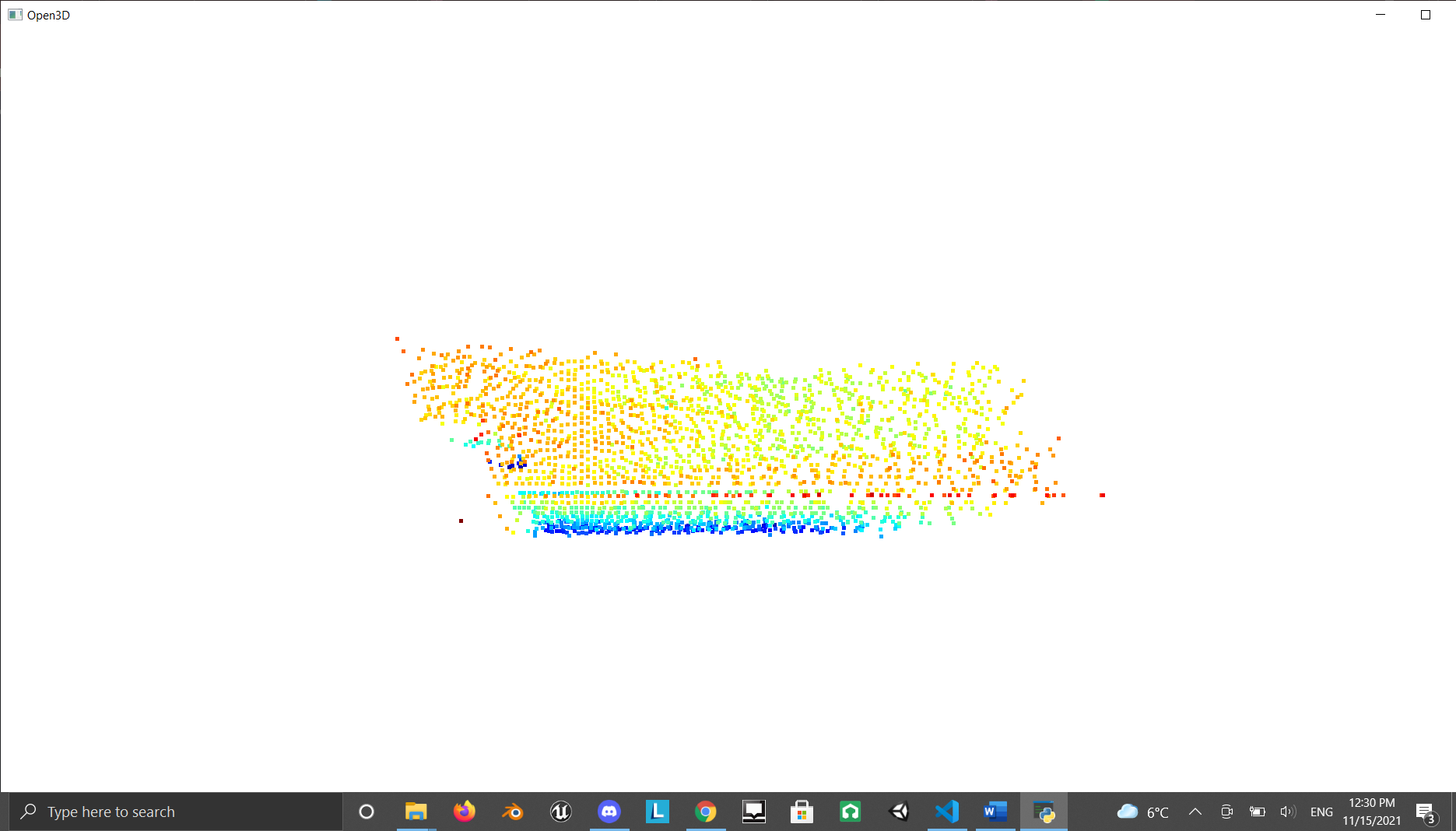
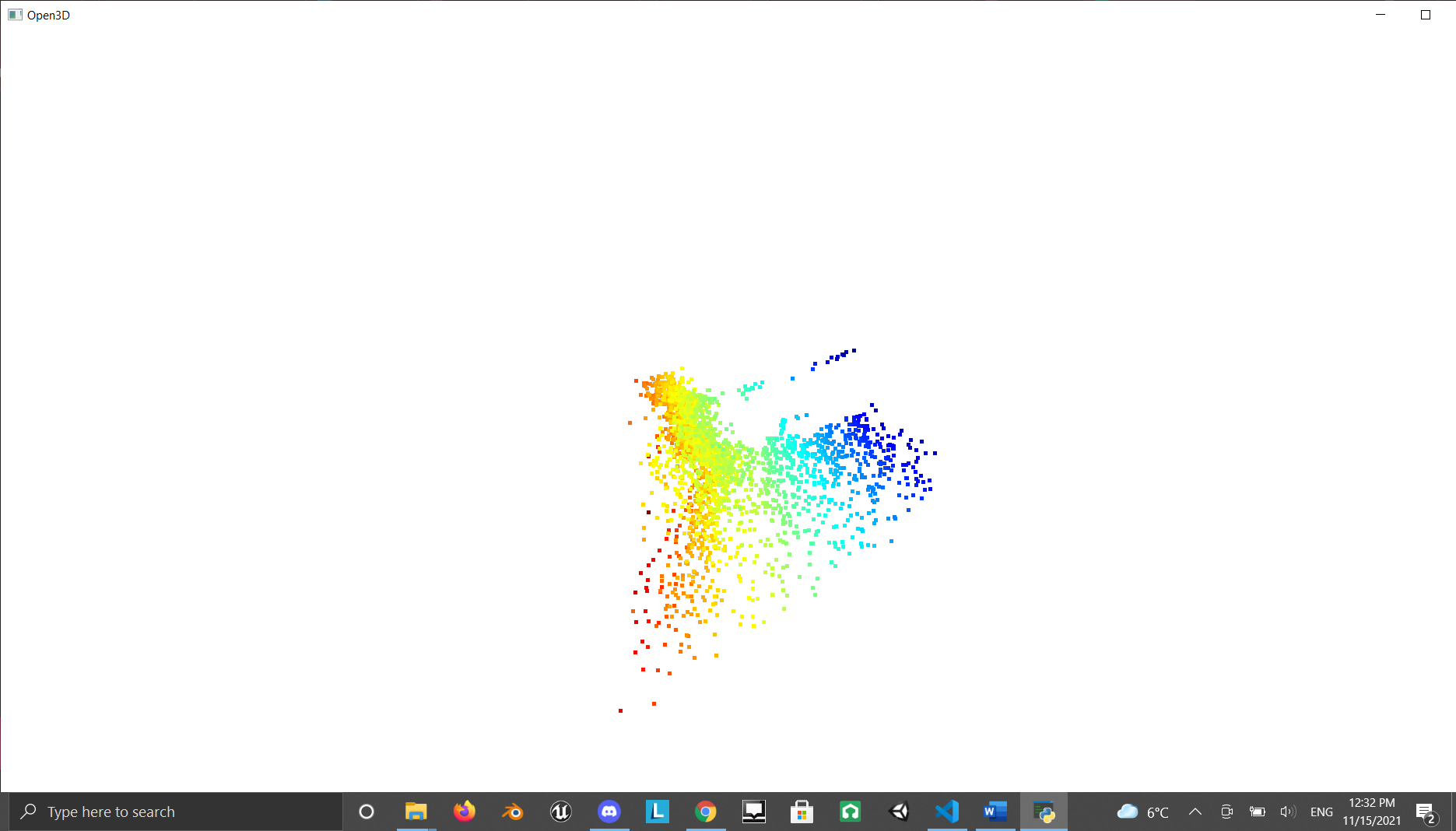
A screenshot from what the point cloud sees (wooden block):
A screenshot from what the camera sees (stairs):

A screenshot from what the point cloud sees (stairs):
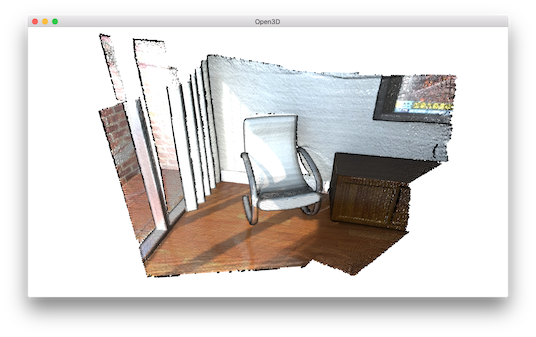
This is something similiar to what I expect/desire, an accurate point cloud based of what the camera sees:
What is the correct way of getting the point cloud from the camera? Or is the points_3d list indeed the point cloud, but is it not getting an accurate result due to, for example, an incorrect integration time?
Thanks in advance for any help! I would love to hear what I am doing wrong or how I could get my wanted result. I would even be grateful for an explenation of how to actually get the point cloud. Thanks!
-
Hi @JackHulspas
Have you tried comparing your open3d point cloud visualizations to the point cloud in the Tau Studio web app?
(See step 1 in the Tau Camera Getting Started Guide for more info on the Tau Studio web app)It's possible the open3d library is expecting the data to be ordered differently.
I would suggest taking a look at the Tau Camera Python API reference: https://taulidarcamera.readthedocs.io/en/latest/