How did you connect 18 servos to the pwm expansion which supports 16?
-
Im trying to do the hexapod project and I saw this and thought how was it possible when only 16 is supported.
https://docs.onion.io/omega2-docs/pwm-expansion.html
-
@Elijah-Combs
If it is not possible then how could I use two omega 2 to communicate each other of motor positions.
-
@Elijah-Combs I think it is posible if you can read circuits and you can draw pcb.
You can use two drivers PCA9685 with total 32 chanels PWM.
It is difficult for you? I can help you with circuit.
-
@Ruslan-Baryshnikov247
I would like help to know how to accomplish this. I do understand circuit diagrams. I just never made one to be manufactured because I don't have a clear understanding on certain components needed for the board. I didn't think it could be done because it said "Note: You may only have one PWM Expansion stacked onto an Omega at a time."
I was looking toward a Mini Maestro 24-Channel USB Servo Controller(https://www.pololu.com/product/1357). I just need to add a logic converter because the Maestro runs on 5v logic high. I was also going to power the omega from it because it has a 5v output and just step down the voltage. but I still unsure on what to do.
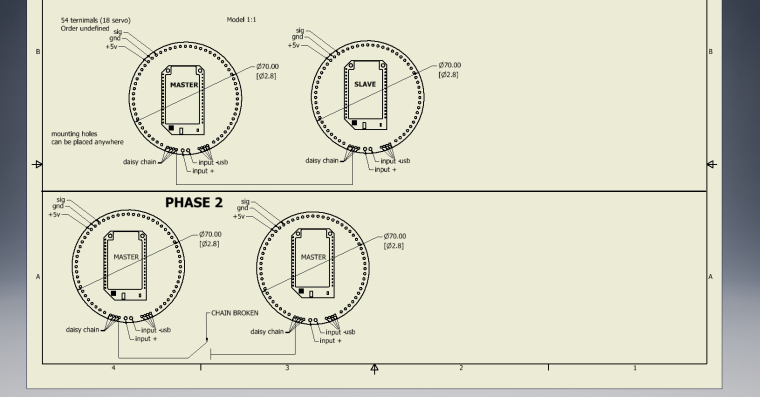
This is what i'm trying to do.
So picture this you have two spiders that are connected and are both ran from one omega(master) and another(slave). However, when they are detached at logic level the second computer controls the motors. So i need on computer to be a Master and the other to be a slave until the disconnect both then become master computer.
-
Look on my expansion board:
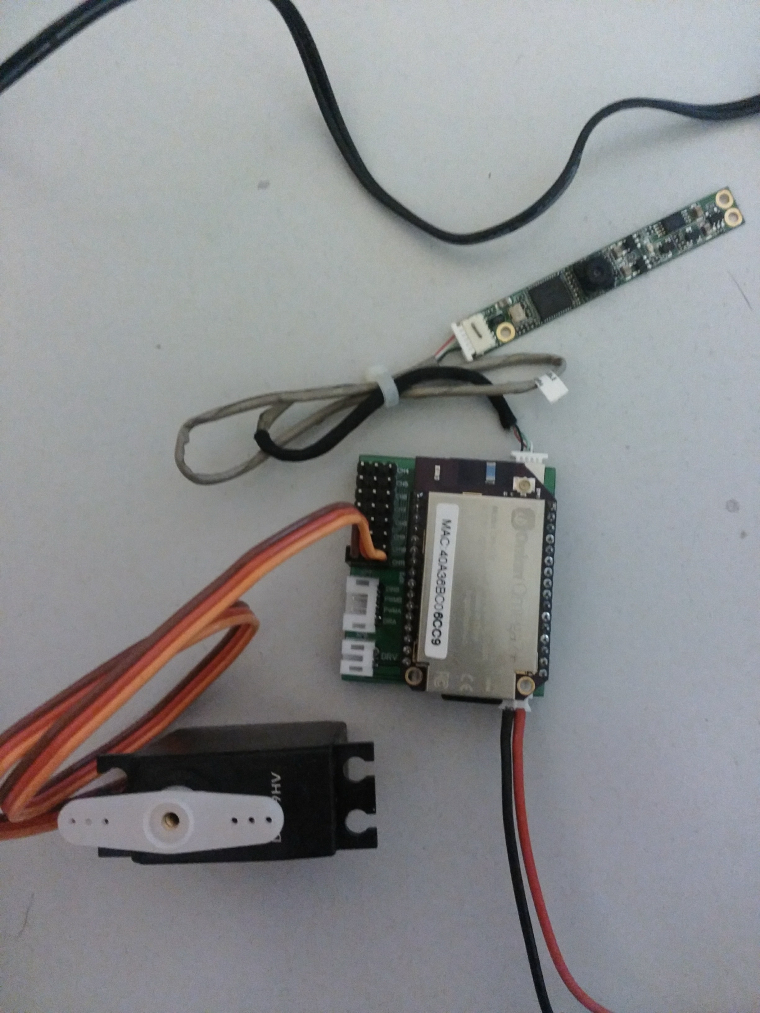

In this board I have one PCA9685.
I can draw circuit and board like this with two PCA9685 and 18-32 channels.
But we have two small problems: 1) You must order pcb in China or another country, 2) We must change code for two drivers.
If you agree I will draw on next week. And what size pcb and wholes on pcb? And what hardware use you? Make photo please)Please draw (for exaple in Paint) your spiders in connect and detach states. I dont understand.
-
Im currently at work. I make CAD models and i'll make a prototype (board)of and basic drawing (two connected objects)of what i'm thinking of. its 10am here and at 11:30 i'll create it real quick to give you a better understanding.
-
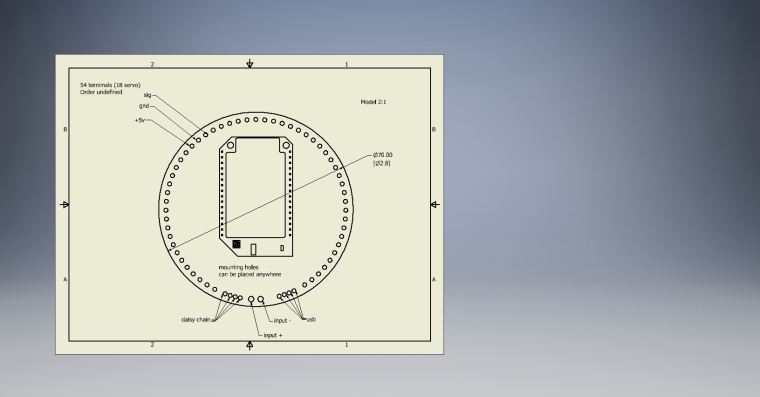
here is a basic idea on how i would like it to operate.
I will make the actual models on the weekend. Its basically like your board, the only difference is the daisy chain, and the there is only 1 power input. The omega will receive power from the servo board.