SPI Bus in Python
-
@Tisham-Dhar @Maximilian-Gerhardt Ok, so we spent some time looking into this.
Short Story
Instead of using
spi.xfer():
Usespi.writebytes()to write your 2 bytes, and thenspi.readbytes()to read 2 bytes.Long Story
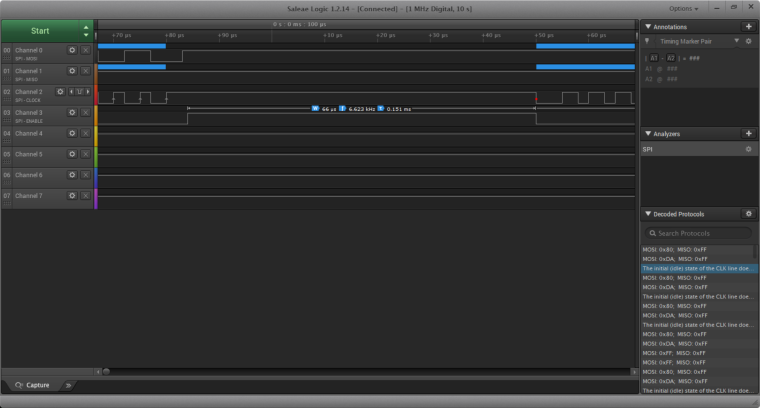
I've tested the above with an MCP3008 and have been able to write and then read the values I see with a logic analyzer.
I've also seen that usingspi.xferlike you mentioned, writing 2 bytes, and then leaving 2 bytes empty as placeholders to read data, does not work, and that I get 4 bytes of (garbage) data back.Why
xferdoesn't work involves a few moving parts, the major ones being the SPI kernel driver and python-spidev.SPI Kernel Driver: As you probably know, we introduced a patch to work around the MT7688's hardware limitations with full-duplex transmissions. This patch allows for write-then-read behaviour in consecutive bytes, meaning, in a single transmission, we can write a byte, and then read the following byte and so on (without disabling the clock or deasserting the CS). But to switch from reading to writing, the buffer for writing needs to be null, and this depends on how the
ioctlcall from userspace is done. Which brings us to...Python spidev Module: I assume the original author of the module designed it to be as generic as possible. If you look at the way the
xferfunction is implemented in C (lines 317-355), you'll see that atxbuf(transmission buffer) and anrxbuf(receiving buffer) of the same length are used in theioctlcall. This length is determined by the length of the list passed in from Python.
So in the case above,spi.xfer([0x80,0xD9,0x00,0x00])will create atxbufwith a length of 4 populated with0x80,0xD9,0x00,0x00and an emptyrxbufof length 4. When the ioctl call is made on line 355, the kernel driver will then go ahead and write the 4 bytes (remember the kernel driver will write data unless the txbuffer data is null), and then return whatever data happened to be in the malloc-ed rxbuf.An Idea for a Fix
While the solution of using
spi.writebytes()to write and thenspi.readbytes()to read will work, it would be nice to have an xfer function that keeps the clock going and CS asserted while doing the write-then-read.This can be accomplished by extending
python-spidevto have anxfer3function:It would look like this:
values = spi.xfer3([<list of bytes to write>], <number of bytes to read>)
so in the case from the previous post:values = spi.xfer3([0x80,0xD9], 2)Underneath in C, the function would be similar to lines 272-376 in the current implementation (ie it would use a spi_ioc_transfer struct pointer) but with a few key differences:
- the malloc-ed length would be based on the length of the input list AND the number of bytes to be read
- there would be a loop to populate xferptr elements with the bytes that should be written - along with nothing in the rx_buf element
- then there would be another loop to populate xferptr elements with an element from the rxbuf buffer, and nothing in the tx_buf element
That way we would end up with an xfrptr list that has 4 elements, the first two have single bytes in the tx_buf element and nothing in the rx_buf element, and then the last two would have nothing in the tx_buf element, but would have a place in memory to write received data.
This implementation would work in tandem with the kernel driver and likely achieve the behaviour you're looking for.
-
@Lazar-Demin I have tried this but in my particular case the delay between writebytes and read bytes was too long and the target ic was coming out waiting for read clocks. Will give it another shot. Give readbytes uses xfer internally not sure how my mileage will vary.
-
@Lazar-Demin As I was seeing previously writebytes followed by readbytes causes too much delay between the read and write transaction and de-asserts chip-select causing loss of the read result. I assume keeping the clock and cs going and populating rx_buffer during the write should be a good solution, actually I belive xfer should be modified to populate rx_buffer anyway since a lot of SPI devices have an echo functionality where the MISO echoes MOSI to tell the driver that the chip is acknowledging data coming in.
My suggestion:
Replace this line with read equivalent size of the xfer or xfer2 write buffer so that data read in from the kernel driver actually reflects whatever the SPI slave is placing on the MISO during the write. Passing read length of 0 seems like a waste. Simply pass it the length of the write buffer, so that we get actual data rather than malloc noise.
Also not sure the purpose of this line, why should the driver populate xfer struct with read_buffer data ? As long is data is read correctly during the full-duplex xfer we should be fine.
Another read
A third read makes the full duplex limitation and need for mediatek special xfer3 clear. So the ioctl explicitly needs to null the xfer tx buffer pointer during the 2 read bytes for this to work.xfer3 would a possible solution once I get the onion toolchain going and can actually compile the python-spidev. Any assistance and mods from your side to implement the patch would be awesome.
-
@Tisham-Dhar Yeah, the de-assertion of the CS line complicates things.
Regarding setting up the Toolchain, take a look at the instructions in our Build System ReadMe. It will likely take the least amount of time if you use the Docker method on a Linux system.
-
@Lazar-Demin the docker make takes a tonne of time and crashes and only seems to work 1/2 decent on a native Linux host instead of a VM on Windows host.
Would you have steps to compile a custom spidev outside of the feeds/onion/python-spidev ? This would be really useful in getting more contributions. I believe the toolchain is the biggest hurdle.
Perhaps run a CI which regularly builds the toolchain and docker snapshots for easier pull.
-
@Tisham-Dhar Yeah, we use a pretty powerful Linux server to build the firmware. You'll notice in our Build System readme that we recommend running Docker on a Linux sytem.
Don't really have instructions to build python-spidev outside of the build system. The CI is a good idea, we'll look into it and see how we can fit that into our road map.
-
@Lazar-Demin I successfully staged and built python-spidev in isolation like this:
make package/python-spidev/{clean,compile,install} V=s
With a very handy tip from OpenWRT here.
This does not take tonnes of time compared to "make world" and is super useful for focusing my contribution. I will fork your python-spidev, patch it with xfer3 , update git link in feed to point to my fork and hack it till it works.
Anyone else is welcome to help me out and join the fun @Maximilian-Gerhardt
Regards,
-
@Tisham-Dhar Ah I misunderstood what you meant by "compile a custom spidev outside of the feeds/onion/python-spidev"
Yes, what you're doing is a good idea.
I would also suggest looking into theUSE_SOURCE_DIRflag, it allows you to use/compile a local copy of the package source code. More info here.
-
I have started a fork an have been making Python signature commits to it. The core xfer3 logic is currently a TODO. If @Lazar-Demin can review and suggest an implementation it will be much appreciated.
-
@Tisham-Dhar the core logic can follow this function here: https://github.com/OnionIoT/omega2-lmic-lorawan/blob/master/native-spi.cpp#L110
Essentially it does two distinct transfers, one for writing and one immediately afterward for reading.
-
EDIT Sep 22, 2023: Updating below commands so Python3 version of spidev module is installed, as Python2 is now legacy
@Tisham-Dhar I've gone ahead and implemented a working half-duplex transmission function! Version 4.0.1 of
python3-spidevfeatures a newxfer3function.Getting the Latest Version of
python3-spidevIf you don't have it installed already:
opkg update opkg install python3-light python3-spidevIf you have it installed, you'll need to upgrade:
opkg update opkg upgrade python3-spidevTo use the new function:
values = spi.xfer3([<list of bytes to write>], <number of bytes to read>)This will write all of the bytes from the list in the first argument and will then immediately read the number of bytes specified by the second argument.
The function will return a list of the bytes that were read.
An Example
Instead of using
spi.xfer([0x80,0xD9,0x00,0x00])Try
values = spi.xfer3([0x80,0xD9], 2)More Details
More details can be found in our python-spidev github repo readme
Let me know how it goes!
-
@Lazar-Demin Is this still just for python 2??? is there a python 3 version??
-
@Juan-Pablo-Jimenez A python3 version is now available as well! See https://github.com/OnionIoT/python-spidev#installation-on-omega2
-
@Lazar-Demin I cannot install version for python3.. it says "Unknown package 'python3-spidev'"
-
@Pablo-Fonovich Which firmware version are you running?
I ask because python3-spidev is published in the new package repo. Try upgrading your firmware to v0.3.0 or higher and trying again.
-
@Lazar-Demin Oh thanks! i had updated to the latest stable. I'm trying right now.
-
@Lazar-Demin That worked! thanks.. are gpio and serial packages available for pyhton3?
-
@Pablo-Fonovich you can get a list of available python3 packages by running:
opkg opkg list | grep python3You can also install
python3-pipto install Python packages, see this guide for more details.
-
@Lazar-Demin , thanks, i've already knew that... but i cannot find any gpio module for python3, nor can i find a serial module for python3.. Are they available?
-
@Lazar-Demin Hey, sorry to continue this after this long. but i started with a second device, isntalled python3-pip, but command line says pip3 not found.. what could be happening?