I'm interested, too. A Docker Image with everything setup would be the best in my opinion.
Alexander Pitzer
@Alexander Pitzer
0
Reputation
8
Posts
1193
Profile views
0
Followers
0
Following
Best posts made by Alexander Pitzer
This user hasn't posted anything yet.
Latest posts made by Alexander Pitzer
-
RE: [OpenWRT] where can I find the .config for the default firmware?posted in Omega Talk

-
Python GPIO to slow (hx711 interface)posted in Omega Talk
At work we have a little CoffeClock, which measures the weight of the coffee machine and show, how much is Coffee is left and how old the coffee is (little arduino project). I wanted to update it and add a website using my omega and python. For this I have to communicate with an HX711. I found a Python Class (https://gist.github.com/underdoeg/98a38b54f889fce2b237) which I modified. The problem is, that with onionGpio I need about 1ms to switch an output high and low.
The HX711 goes into power down state when the signal is high for more then 60µs ....
The question:- is there an faster python module?
- are system calls to fastGPIO faster?
- should I forget about wasting time with Python and do it in C++?
Thanks Guys for your help!
-
RE: [Solved, more or less] OpenWRT C++ CrossCompile uClibc setupposted in Omega Talk
@Boken-Lin I try to compile the new version and will play around with the toolchain a bit. If nothing helps I will go back. Thank's alot for your help. The Onion Omega is a great product and I really like to play around with it alot!
-
RE: [Solved, more or less] OpenWRT C++ CrossCompile uClibc setupposted in Omega Talk
Sry I updated my post... so yes uClibc was kicked and uClibc-ng is in but only as broken package
-
RE: [Solved, more or less] OpenWRT C++ CrossCompile uClibc setupposted in Omega Talk
I believe I found the problem, in the current version of openWRT uClibc is available if broken packages are allowed. RIght now I compile the toolchain: toolchain-mips_34kc_gcc-5.2.0_uClibc-1.0.9
They switched to uClibc-ng-1.0.98e493a4b7c0749bf65cfd545ca18b384bc1d4f32 12/03/2015 03:47 PM uClibc-ng: update to 1.0.9 Update to 1.0.9, switch to XZ tarball. Signed-off-by: Waldemar Brodkorb <wbx@uclibc-ng.org> git-svn-id: svn://svn.openwrt.org/openwrt/trunk@47715 3c298f89-4303-0410-b956-a3cf2f4a3e73b70a36d1d969f5aa9ad081c9a395633793582a5a 11/02/2015 07:12 PM uclibc: remove version 0.9.33 Latest uClibc-ng is now the only supported option Signed-off-by: Felix Fietkau <nbd@openwrt.org> git-svn-id: svn://svn.openwrt.org/openwrt/trunk@47357 3c298f89-4303-0410-b956-a3cf2f4a3e73
-
RE: [Solved, more or less] OpenWRT C++ CrossCompile uClibc setupposted in Omega Talk
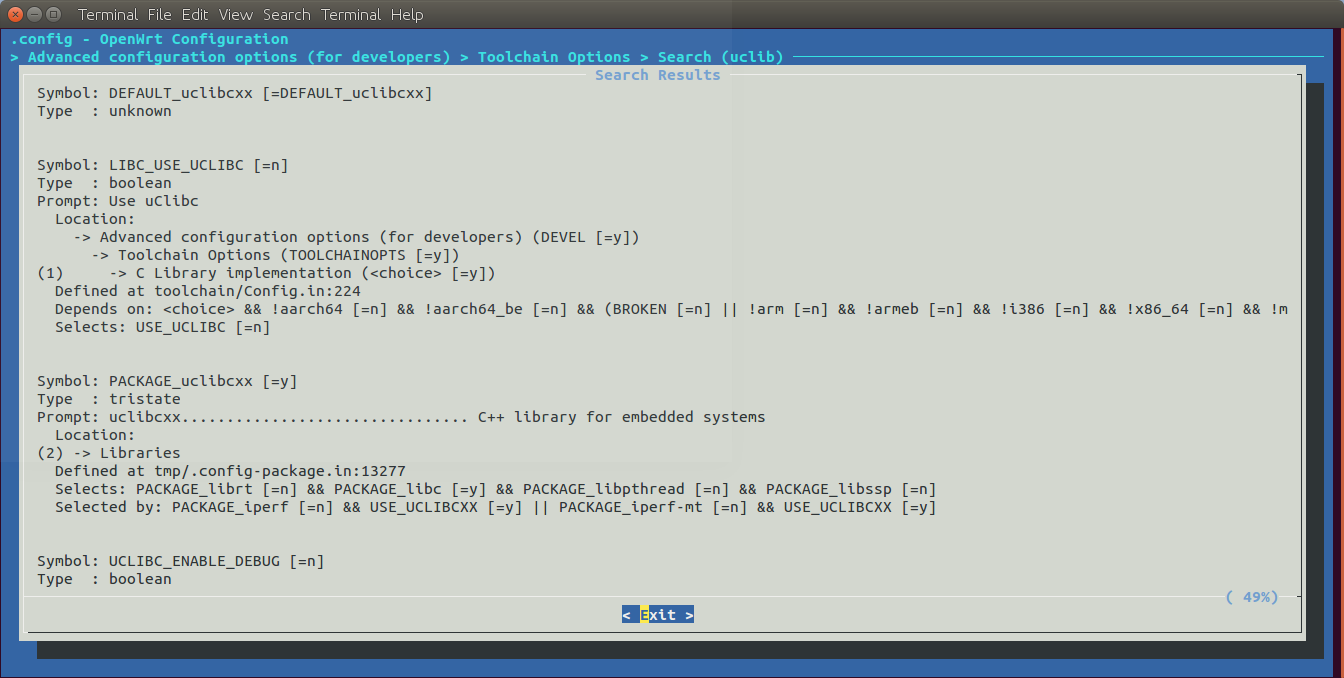
Yeah I tried this before, too. But there is no option for uClibc....
May it be possible to poste a .conf with the right kernel settings?Because the dependency for uClibc contains : .... && !mips [=y] && ....
and mips is set by: .... || TARGET_ar71xx_generic [=y] && <choice> && TARGET_ar71xx [=y] || ....
-
RE: [Solved, more or less] OpenWRT C++ CrossCompile uClibc setupposted in Omega Talk
Thank you for your suggestion,
I know that a lot of people just use the SDK to compile programs, but I want to get the openWRT package CrossCompile environment to work. I want to create packages that I can install on the onion (.ipk packages if I'm remember correctly). I don't know how to get the toolchain you suggested into the openWRT environment, so if you have an Idea how to do that, it would be perfect

I mean someone
") compiles their packages with the correct toolchain/setup and provide this packages to us, don't they?
compiles their packages with the correct toolchain/setup and provide this packages to us, don't they?
-
[Solved, more or less] OpenWRT C++ CrossCompile uClibc setupposted in Omega Talk
Hiho,
I want to compile a "helloWorld"-package with the openwrt standart setup found on: https://github.com/OnionIoT/OpenWRT-Packages/wiki/Setting-Up-the-Cross-Compile-EnvironmentThe problem is, that with this setup a normal program links dynamically against: "ld-musl-mips-sf.so.1" but the onion has "ld-uClibc.so.0" installed. I know that a static linked program works, but in the end I don't want to get hello World to work
$ readelf -l helloWorld Elf file type is EXEC (Executable file) Entry point 0x400600 There are 9 program headers, starting at offset 52 Program Headers: Type Offset VirtAddr PhysAddr FileSiz MemSiz Flg Align PHDR 0x000034 0x00400034 0x00400034 0x00120 0x00120 R E 0x4 INTERP 0x000154 0x00400154 0x00400154 0x0001a 0x0001a R 0x1 [Requesting program interpreter: /lib/ld-musl-mips-sf.so.1] REGINFO 0x000170 0x00400170 0x00400170 0x00018 0x00018 R 0x4 LOAD 0x000000 0x00400000 0x00400000 0x008f0 0x008f0 R E 0x10000 LOAD 0x000fdc 0x00410fdc 0x00410fdc 0x00050 0x00074 RW 0x10000 DYNAMIC 0x000188 0x00400188 0x00400188 0x00110 0x00110 RWE 0x4 GNU_STACK 0x000000 0x00000000 0x00000000 0x00000 0x00000 RW 0x10 GNU_RELRO 0x000fdc 0x00410fdc 0x00410fdc 0x00024 0x00024 R 0x1 NULL 0x000000 0x00000000 0x00000000 0x00000 0x00000 0x4 Section to Segment mapping: Segment Sections... 00 01 .interp 02 .reginfo 03 .interp .reginfo .dynamic .hash .dynsym .dynstr .gnu.version .gnu.version_r .rel.plt .init .text .MIPS.stubs .fini .rodata .eh_frame .plt 04 .ctors .dtors .got.plt .rld_map .got .sdata .bss 05 .dynamic 06 07 .ctors .dtors .got.plt 08After reading "https://community.onion.io/topic/9/how-to-install-gcc" I believe that this dynamic link is what caused the problem for Kit Bishop:
root@Omega:~# ls -l -rwxrwxrwx 1 root root 8994 Nov 18 12:26 testc root@Omega:~# ./testc -ash: ./testc: not found root@Omega:~#(Sry but I can't find a link to his post option :-()
I see that the tool chain uses the wrong stdLib, that path name of the tool chain looks like: "...toolchain-mips_34kc_gcc-5.2.0_musl-1.1.11/
I have the kernel settings on "Preferred standard C++ library (uClibc++) --->" but the other uClibc settings I can't activate because mips is set and I don't know where openwrt configures the tool chain std lib.
So the question is: How to configure the openwrt setup to compile programs for the existing onion os? How to use uClibc instead of musl?
Just for completness here are my helloWorld Makefile:
# build helloworld executable when user executes "make" helloWorld: helloWorld.o @echo "\n\n----------------------\n\n" @echo "CXX: $(CXX)" @echo "CFLAGS: $(CFLAGS)" @echo "LDFLAGS: $(LDFLAGS)" @echo "LIB: $(LIB)" $(CXX) $(LDFLAGS) helloWorld.o -o helloWorld helloWorld.o: helloWorld.c $(CXX) $(CXXFLAGS) -c helloWorld.c all: helloWorld clean: rm *.o helloWorldand the openWRT project Makefile:
include $(TOPDIR)/rules.mk PKG_NAME:=helloWorld PKG_VERSION:=1 PKG_RELEASE:=1 # This specifies the directory where we're going to build the program. # The root build directory, $(BUILD_DIR), is by default the build_mipsel # directory in your OpenWrt SDK directory PKG_BUILD_DIR := $(BUILD_DIR)/$(PKG_NAME) include $(INCLUDE_DIR)/package.mk define Package/helloWorld SECTION:=alex CATEGORY:=alex TITLE:=HalloWorld endef define Package/helloWorld/description Hello World endef # Specify what needs to be done to prepare for building the package. # In our case, we need to copy the source files to the build directory. # This is NOT the default. The default uses the PKG_SOURCE_URL and the # PKG_SOURCE which is not defined here to download the source from the web. # In order to just build a simple program that we have just written, it is # much easier to do it this way. define Build/Prepare mkdir -p $(PKG_BUILD_DIR) $(CP) /home/apit/projects/openwrt/helloWorld/* $(PKG_BUILD_DIR)/ endef MAKE_OPTS:= \ ARCH="$(LINUX_KARCH)" \ CROSS_COMPILE="$(TARGET_CROSS)" \ SUBDIRS="$(PKG_BUILD_DIR)" define Package/helloWorld/Compile cd $(PKG_BUILD_DIR) #$(MAKE) -C $(PKG_BUILD_DIR) \ # LDFLAGS="$(EXTRA_LDFLAGS)" \ # CXXFLAGS="$(TARGET_CFLAGS) $(EXTRA_CPPFLAGS) -nostdinc++" \ # $(TARGET_CONFIGURE_OPTS) \ # CROSS="$(TARGET_CROSS)" \ # ARCH="$(ARCH)" \ # $(1); $(MAKE) -C $(PKG_BUILD_DIR) $(MAKE_OPTS) endef define Package/helloWorld/install $(INSTALL_DIR) $(1)/bin/ $(INSTALL_BIN) $(PKG_BUILD_DIR)/helloWorld $(1)/bin/helloWorld endef $(eval $(call BuildPackage,helloWorld))Of course alot of that lines are from openwrt hello world tutorials or from onion omega projects. I also remove some lines, so if it not compile its because I erased to much
") ... I tried to keep it clean here... sry.
... I tried to keep it clean here... sry.PS: thanks alot for your help!
PSS: I found this statistic: http://www.etalabs.net/compare_libcs.html
Is it possible that compiling the os with musl is faster and smaller then with uClibc?