TAU stuck on "Looking for connected Tau LiDAR Camera hardware ..."
-
Hi lads!
So, after installing everything according to the step-by-step Guide, python 3.9, pip updated, Tau server, libraries and APIs installed, etc... and when trying to execute the "python -m TauLidarServer" command, it just stays there, indefinitely.
I'm not sure if I have a faulty Tau hardware, or my USB-C path/port isn't the correct one.TauLidarCamera 0.0.3
TauLidarCommon 0.0.2
TauLidarServer 0.0.5
pip 21.1.3
Python 3.9.6
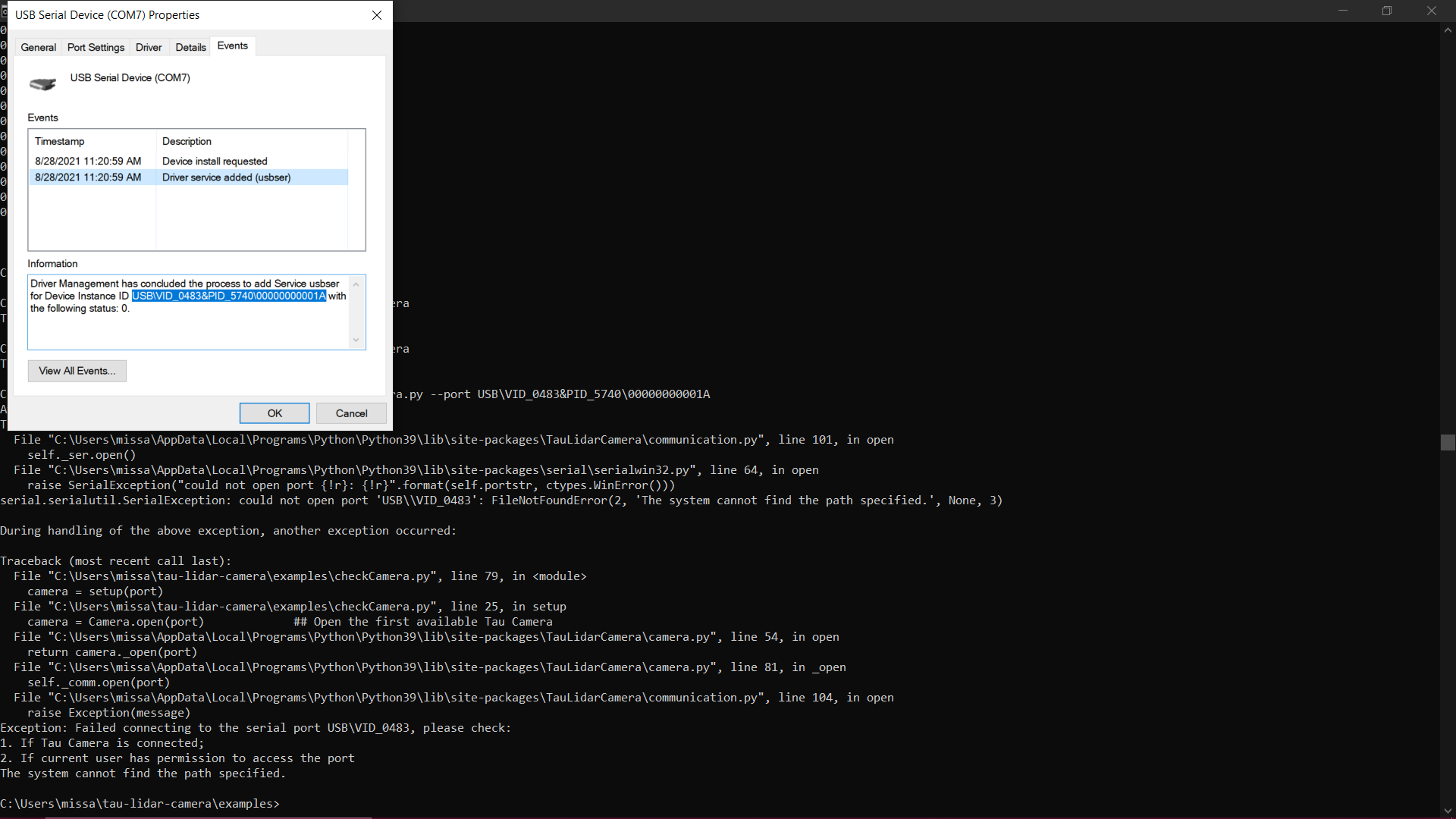
Win10Tau Lidar connected to COM1 (USB\VID_0483&PID_5740\00000000001A
)Status for device COM1:
Baud: 115200 Parity: None Data Bits: 8 Stop Bits: 1 Timeout: OFF XON/XOFF: OFF CTS handshaking: OFF DSR handshaking: OFF DSR sensitivity: OFF DTR circuit: OFF RTS circuit: ON
-
Hey @Zakrze ! sounds frustrating. Are you able to run any of the other examples?
What browser are you typing the 127.0.0.1 URL into?
Do you have any spam protection plug-ins ? may need to disable for that URL
-
Hi @kevin-lefrank, my TauLidar Server not even starts in the CMD, its stays there forever at "Looking for connected Tau LiDAR Camera hardware ..." loop
-
@Zakrze were you able to run any of the other examples from the GitHub repo?
Do they stop at the same point?
-
@Zakrze I'm also interested to hear if any of the example python programs ran properly.
If not, please try running the new
checkCamera.pyexample program to try to narrow down what's going on with that problematic camera.
You can find all of the details on thecheckCamera.pyexample program here: https://github.com/OnionIoT/tau-lidar-camera/tree/master/examples#checkcamerapy-programLet me know how it goes - I'll do my best to help you debug this issue.
-
Hi @Lazar-Demin and @kevin-lefrank,
I tried every example, moved the folder to a different location and tried it again, tried different boud rates, long and short USB-C cables, and I still stuck on "Looking for connected Tau LiDAR Camera hardware ...", but I noticed that the hardware itself is getting hot, all LEDs are on but solid/no blink/no sign of date being transferred.
Thanks lads!!
-
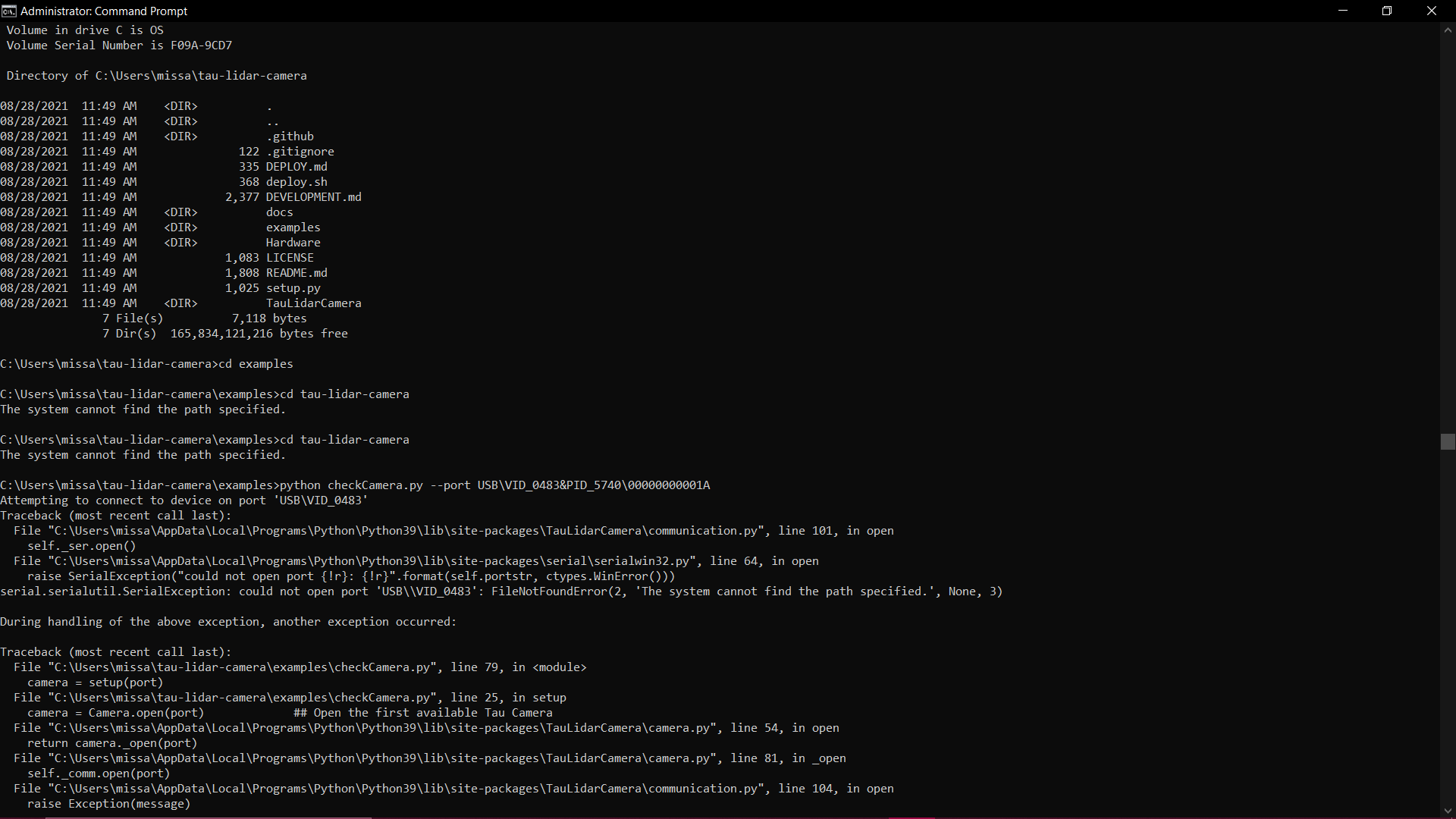
@Zakrze Hmm that's pretty odd! One more check before we declare the hardware faulty.
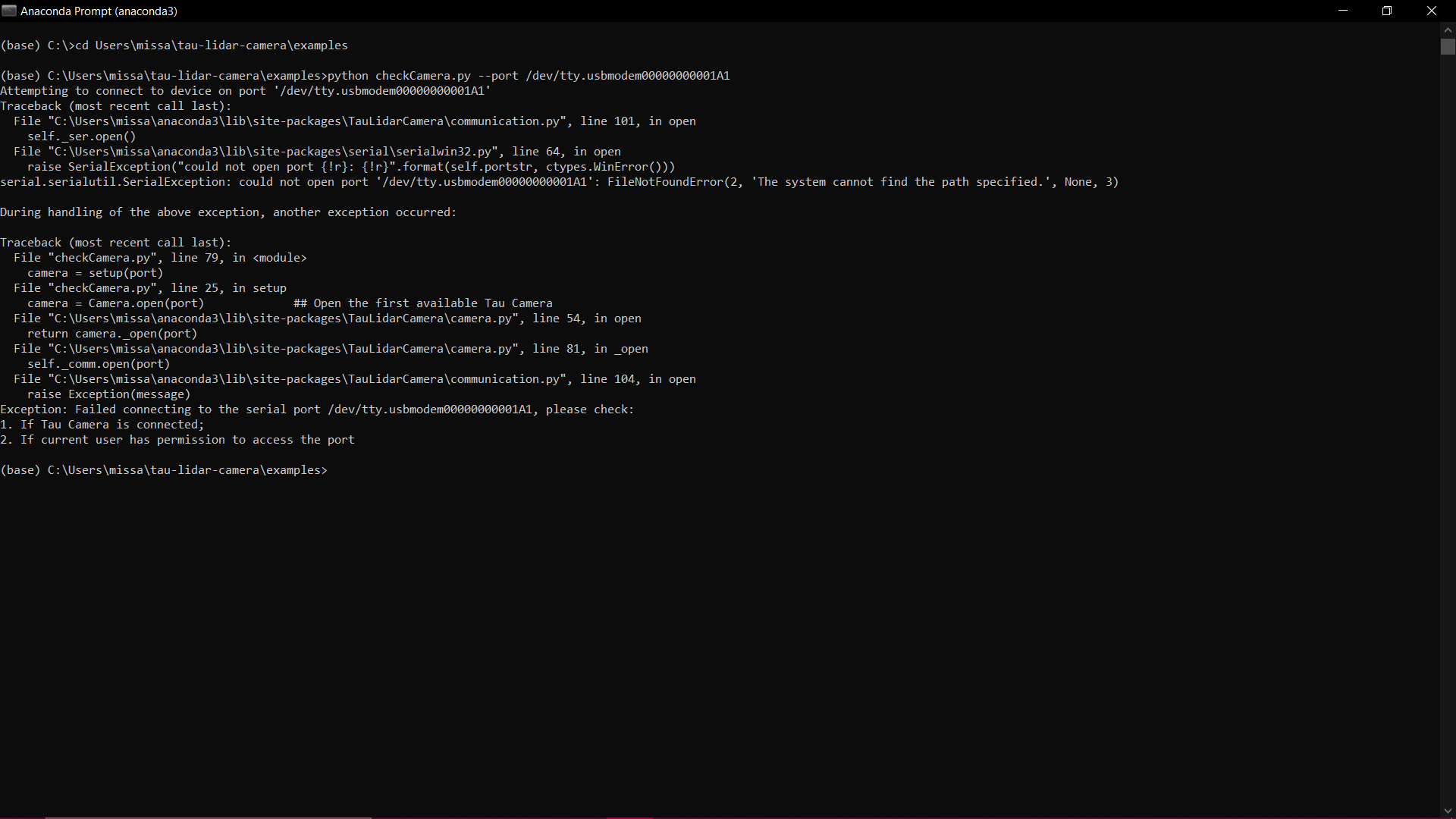
Can you try running the
checkCamera.pyexample program in Mode 2 where you specify the serial port:python checkCamera.py --port <SERIAL PORT>More info here: https://github.com/OnionIoT/tau-lidar-camera/tree/master/examples#mode-2---specifying-a-port
-
@Zakrze We've released an update to the TauLidarCamera python module with a fix for this issue.
Can you try updating and trying again? Instructions can be found in the updated troubleshooting guide.
Let me know how it goes!
-
@Lazar-Demin Hi, I have this same issue.
-
-
@Lazar-Demin I have a 3 foot cable and will go out today to buy a shorter cable
-
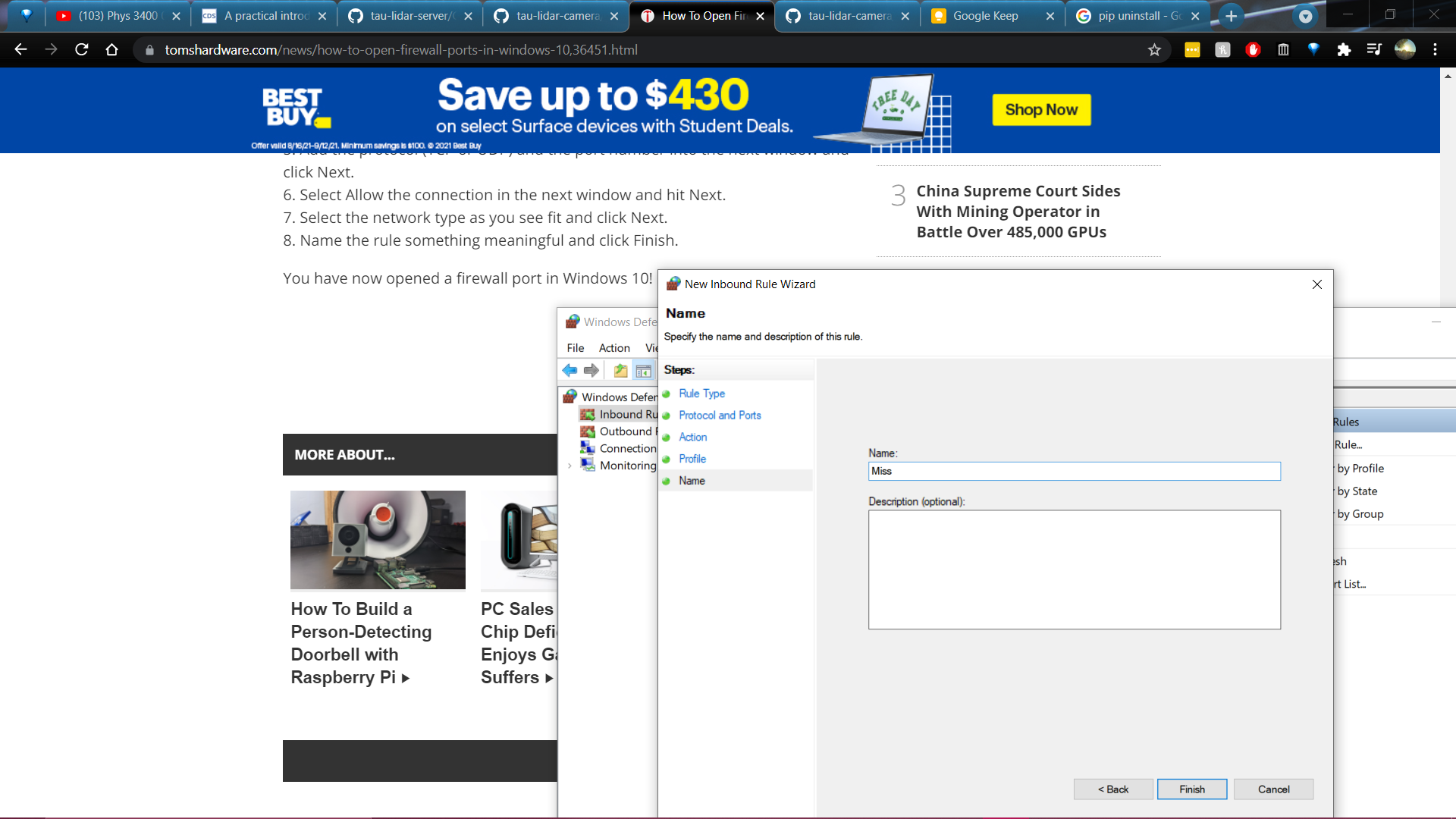
I tried a shorter cable, updating drivers, and changing port settings in the control panel
-
-
@Missa IT WORKED. What fixed it was running it with CMD Administrative permission and unplugging for 10 seconds
-
@Missa Happy you resolved the issue!
We've updated the Troubleshooting Guide to cover this scenario as well!
Let us know what you end up doing with your Tau Camera!