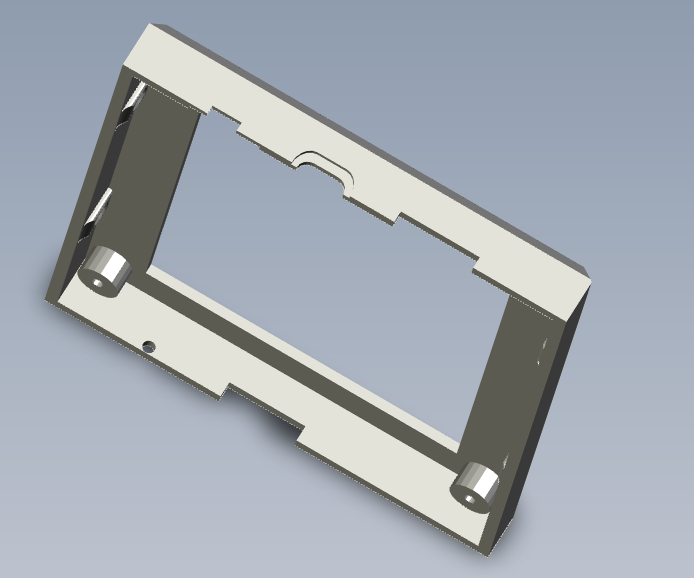
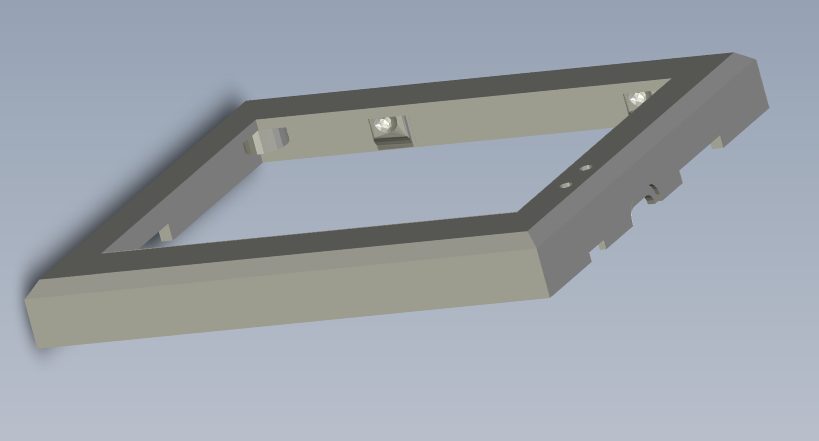
I designed this case so I could wall mount my Omega Dash. The case is in two parts that clip together using snaps. I designed this using the Dash Beta device and the LCD moved around a bit so some adjustment to the LCD recess may be required, I'll update it once I receive my production devices.
Here is a photo of the rough 3D printed version, it needs finishing and I am a terrible photographer.
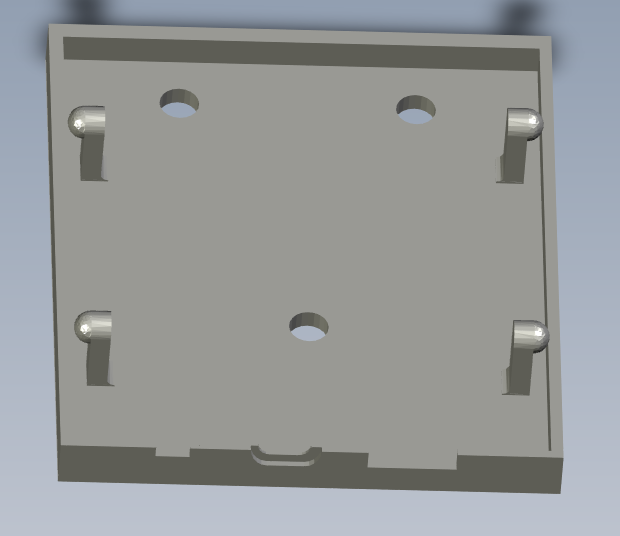
This is printed on a FlashForge Guider2S using PLA filament, the extruder is set to 220 degrees, the bed is heated to 20 degrees and I use a glue stick for adhesion. I print the top plate face down so there is no need for supports, no brim and no raft.

STL files are here: https://github.com/crispyoz/Omega-Dash-Casing.git
 ) which I integrated with my home automation system so I've been tweaking this for about 7 years now. I do see a potential flaw in your "Automatic" system. Watering plants is more than just weather, it is about soil moisture and soil moisture is impacted by numerous factors, including the type of soil, ground coverage and obstructions. For a very basic garden maybe this idea would work, but a garden of any complexity will require reading soil moisture otherwise you'll end up over watering or under watering. Different plants require different moisture levels to survive so I ended up using moisture sensors in order to allow my system be able to understand the moisture content of the various areas of the garden and any specific plants that need special attention.
) which I integrated with my home automation system so I've been tweaking this for about 7 years now. I do see a potential flaw in your "Automatic" system. Watering plants is more than just weather, it is about soil moisture and soil moisture is impacted by numerous factors, including the type of soil, ground coverage and obstructions. For a very basic garden maybe this idea would work, but a garden of any complexity will require reading soil moisture otherwise you'll end up over watering or under watering. Different plants require different moisture levels to survive so I ended up using moisture sensors in order to allow my system be able to understand the moisture content of the various areas of the garden and any specific plants that need special attention.